
Haushaltsroboter
Dank Magneten können diese Roboter die unterschiedlichsten Funktionen ausführen
Online seit: 30.11.2009,
Anzahl Besuche: 70440
0
Inhaltsverzeichnis
Eines meiner Hobbys ist der Bau von mobilen Robotern, die ich hier gerne vorstellen möchte.
Die Abbildungen der folgenden vier Anwendungen sind mit freundlicher Genehmigung des Verlages dem Buch "Grundlagen der Robotertechnik", erschienen im Elektor-Verlag, entnommen.
In diesem Buch finden sich auch Bauanleitungen zu weiteren Robotern.
Tafelwischer
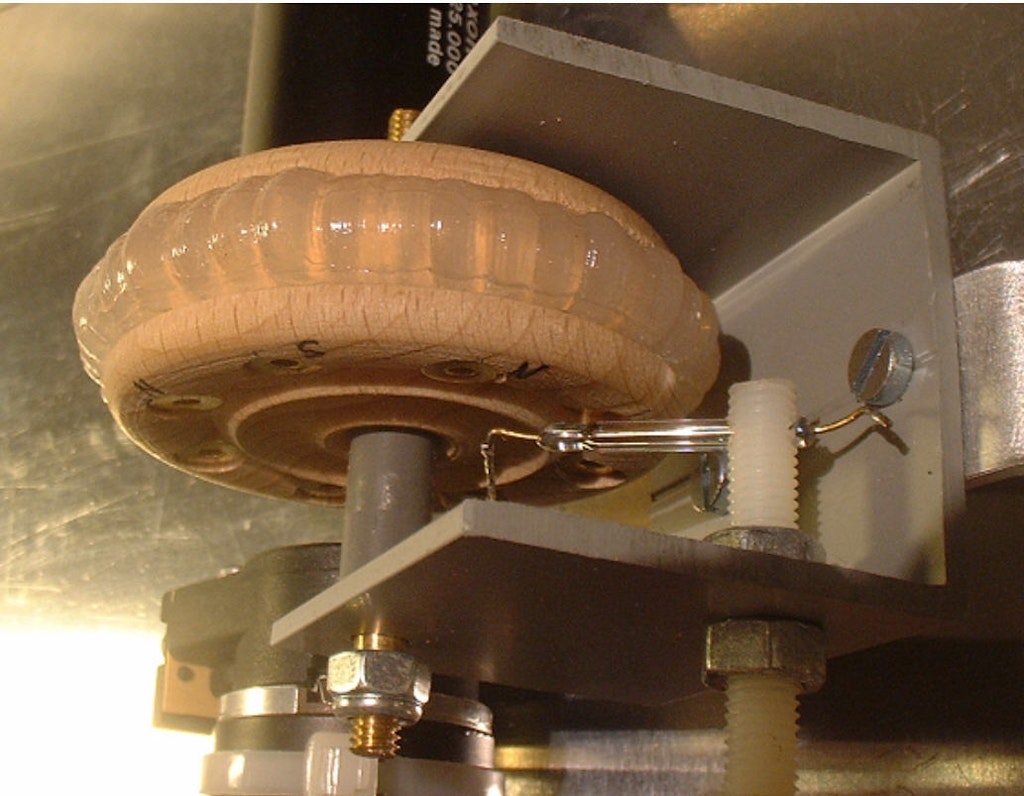
Mit Supermagneten kann ein Fahrzeug so konstruiert werden, dass es an senkrechten metallischen Flächen oder gar an der Decke fahren kann. Sie können beispielsweise für ein mobiles Roboterfahrzeug eingesetzt werden, welches an einer Magnettafel fahren kann und diese gegebenenfalls dabei noch reinigt. Dazu muss ein solches Fahrzeug mit höhenverstellbaren Haftmagneten ausgerüstet werden, die es mit großer Kraft an die metallische Wand oder Decke ziehen.Über die Gewindestange kann der Abstand zur magnetisierbaren Fläche so eingestellt werden, dass die Zugkraft einerseits möglichst hoch ist, andererseits aber die beiden Ringmagnete R-27-16-05-N
die Fläche (auch bei allfälligen Unebenheiten!) nicht berühren.


Ein höhenverstellbarer Ringmagnet, mit Epoxykleber vergossen

Deutlich sind die beiden justierbaren Haftmagnete zu erkennen

Aluminiumröhrchen mit 4 mm Innendurchmesser, mit Schrumpfschlauch überzogen, Reedschalter eingeklebt
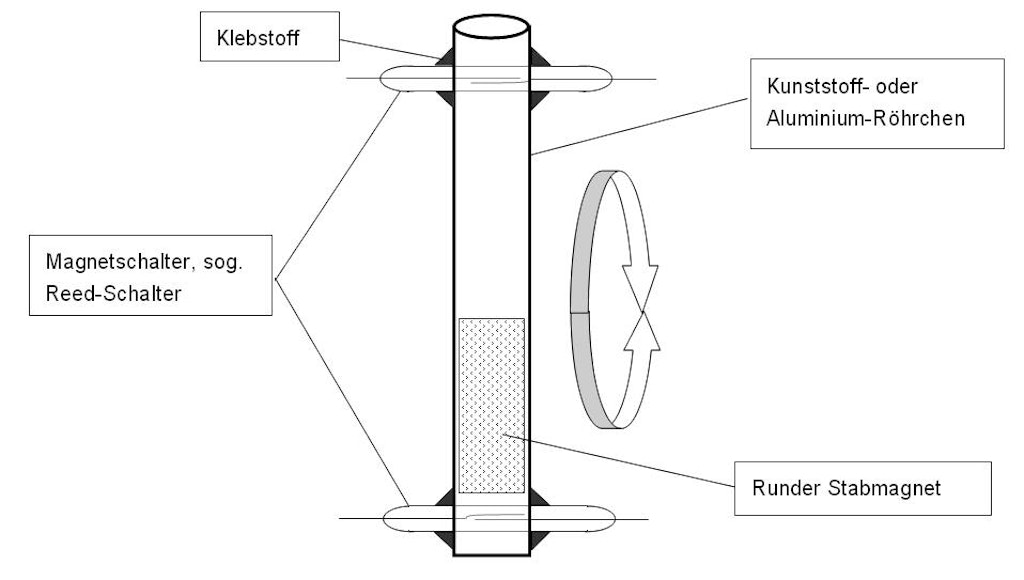
Schwerkraftschalter
Eine weitere Anwendung im Bereich Elektronik oder Robotik ist der Einsatz von Supermagneten als Schwerkraftschalter. Im Bereich der Robotik kann ein solcher Schwerkraftschalter beispielsweise dazu eingesetzt werden, Fahrmotoren ein- oder umzuschalten. Das Prinzip beruht darauf, dass ein Magnet einen Reedschalter betätigt.Je nach Lage des inneren S-04-10-AN-Stabmagneten
wird dabei einer der beiden Reedschalter betätigt.
Als Führungsröhrchen benutzt man vorzugsweise ein Aluminiumröhrchen.
Durch den Wirbelstromeffekt wird der Magnet beim Herunterrutschen gebremst und somit besteht nicht die Gefahr, dass der Magnet die empfindlichen Reedkontakte (meist aus Glas) zerstört.
Der Durchmesser des Stabmagneten muss dabei so gewählt werden, dass er etwas kleiner ist als das Aluminiumröhrchen.
 in einem rollenden Roboter")
Einsatz eine Schwerkraftschalters (Mitte) in einem rollenden Roboter

Der Schwerkraftschalter befindet sich oben rechts
Dadurch kann man einen Roboter beispielsweise einfach ausschalten, indem man ihn umdreht.
Oder man nutzt die Vorrichtung dazu, die Fahrmotoren umzupolen, wenn ein Roboterfahrzeug auf den Rücken fällt.
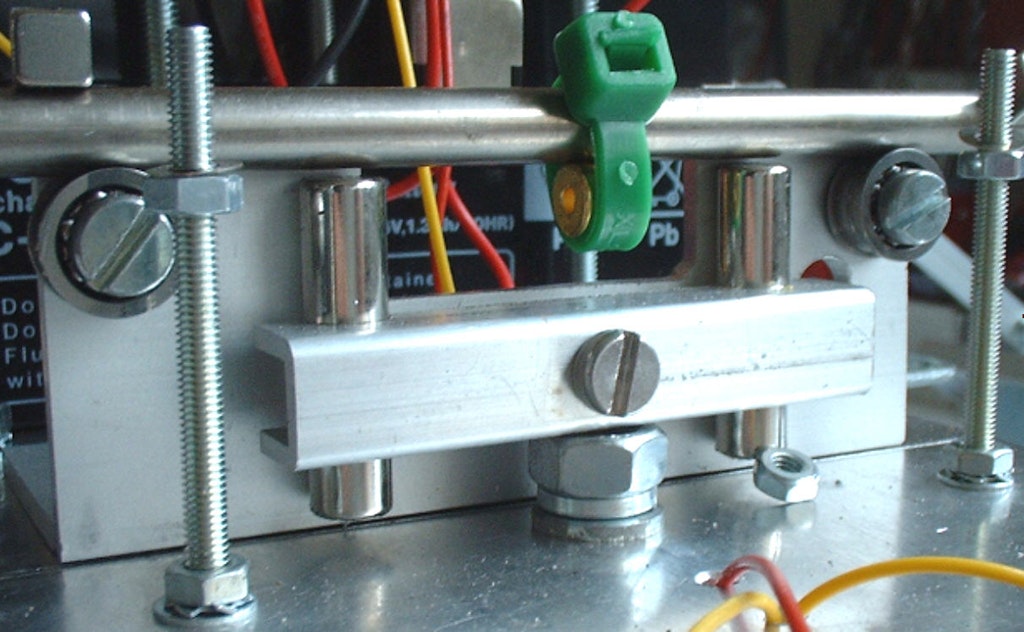
Roboterbewegungen detektieren
Mobile Roboter müssen sich autonom in einer Umgebung bewegen. Dazu sind sie in der Regel mit diversen Sensoren zur Hinderniserkennung ausgerüstet. Dennoch kann es passieren, dass sich ein Roboterfahrzeug aus unvorhergesehen Gründen "festfährt". Ein solches "Festfahren" kann durch die Detektion der Bewegung eines nicht angetriebenen, mitlaufenden Rades erfolgen.Hierzu können sehr gut Ringmagnete des Typs R-10-04-05-
eingesetzt werden, die in das Rad eingelassen oder aufgeklebt werden und mittels eines Reedkontaktes Impulse geben.
Über die Frequenz der Impulse kann die reale Geschwindigkeit des Roboters ermittelt werden.
Bleiben dagegen die Impulse aus, obwohl sich die Antriebsräder des Roboters drehen, hat sich der Roboter offensichtlich festgefahren.
Die Magnete werden vorzugsweise in alternierender Polung (Nord-/Südpol immer abwechselnd) installiert und betätigen bei einer Drehung des Rades einen benachbarten Reed-Kontakt (siehe unten).


Linearlager für mobile Roboter
Manchmal muss sich eine Vorrichtung mit wenig Widerstand linear (nach links und rechts) bewegen können.Die Führung von Achsen für solche Linearbewegungen ist nun nicht immer ganz einfach.
Ich habe daher eine recht einfach zu realisierende und gleichzeitig sehr zuverlässig funktionierende Vorrichtung mit Supermagneten konstruiert.
Dabei wird eine Eisenstange von zwei Stabmagneten S-06-25-N
auf 2 Kugellager mit Bund gezogen.
Fixiert man, wie in der folgenden Abbildung gezeigt, an der Führungsstange noch einen weiteren, zu den Zugmagneten entgegengesetzt gepolten Magneten, erhält man eine fast reibungsfreie Magnetfeder.
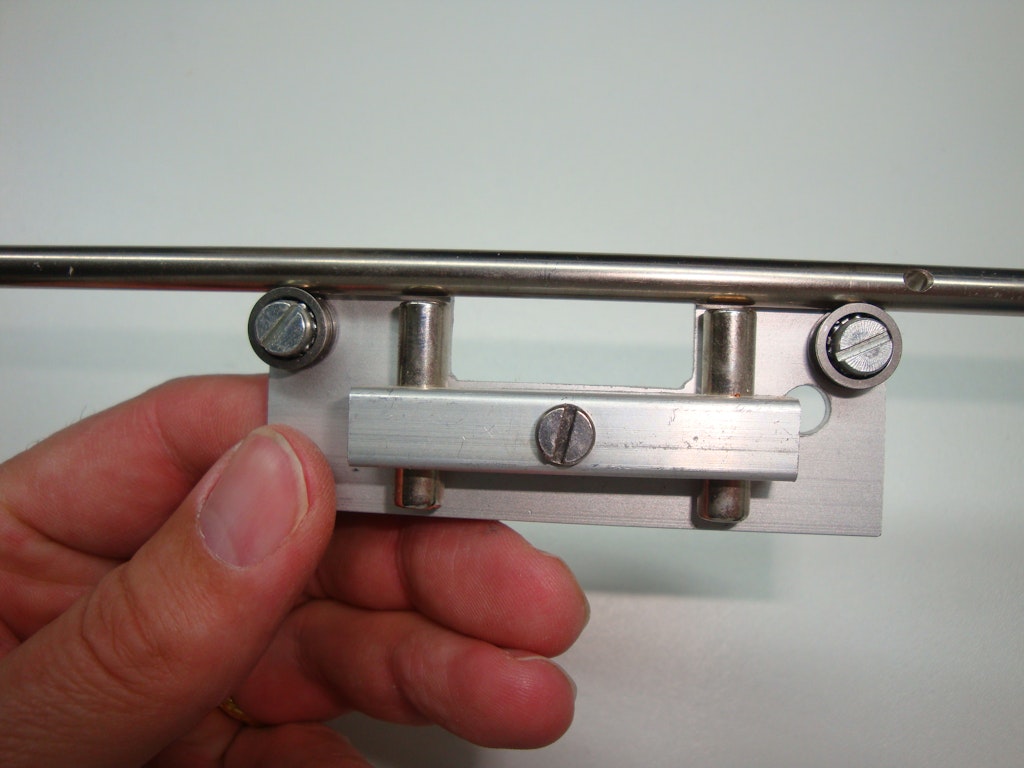
Die Magnete müssen so fixiert werden, dass zwischen Magnet und Stange noch ein Spalt von etwa 1 mm bleibt, sonst ist die Anziehungskraft zu groß.
Verwendete Artikel
Laden...

Stabmagnet Ø 6,35 mm, Höhe 25,4 mm, hält ca. 1,7 kg, Neodym, N42, vernickelt
| 5 St. | 1,80 EUR/St.* | |
| ab | 15 St. | 1,58 EUR/St.* |
| ab | 40 St. | 1,41 EUR/St.* |
| ab | 80 St. | 1,32 EUR/St.* |
| Rabatt anfragen ab 450 St. | ||
verfügbar: 58 200 St.

Ringmagnet Ø 10/4 mm, Höhe 5 mm, hält ca. 2,5 kg, Neodym, N42, vergoldet
| 5 St. | 1,16 EUR/St.* | |
| ab | 15 St. | 1,01 EUR/St.* |
| ab | 40 St. | 0,90 EUR/St.* |
| ab | 80 St. | 0,83 EUR/St.* |
| Rabatt anfragen ab 550 St. | ||
verfügbar: 12 575 St.


Ringmagnet Ø 26,75/16 mm, Höhe 5 mm, hält ca. 11 kg, Neodym, N42, vernickelt
| 1 St. | 4,06 EUR/St.* | |
| ab | 3 St. | 3,57 EUR/St.* |
| ab | 10 St. | 3,14 EUR/St.* |
| ab | 20 St. | 2,92 EUR/St.* |
| ab | 40 St. | 2,74 EUR/St.* |
| Rabatt anfragen ab 280 St. | ||
verfügbar: 3 586 St.

Stabmagnet Ø 4 mm, Höhe 10 mm, hält ca. 700 g, Neodym, N45, vernickelt
| 5 St. | 0,55 EUR/St.* | |
| ab | 15 St. | 0,47 EUR/St.* |
| ab | 40 St. | 0,41 EUR/St.* |
| ab | 80 St. | 0,38 EUR/St.* |
| Rabatt anfragen ab 800 St. | ||
verfügbar: 71 510 St.

Ringmagnet Ø 10/4 mm, Höhe 5 mm, hält ca. 2,5 kg, Neodym, N42, vernickelt
| 5 St. | 0,95 EUR/St.* | |
| ab | 15 St. | 0,83 EUR/St.* |
| ab | 40 St. | 0,74 EUR/St.* |
| ab | 80 St. | 0,68 EUR/St.* |
| Rabatt anfragen ab 650 St. | ||
verfügbar: 51 930 St.
0 Personen gefällt dieses Kundenprojekt
-Projekte werden in Ihrem Kundenkonto gemerkt




Stichwörter
Der gesamte Inhalt dieser Seite ist urheberrechtlich geschützt.
Ohne ausdrückliche Genehmigung darf der Inhalt weder kopiert noch anderweitig verwendet werden.
Ohne ausdrückliche Genehmigung darf der Inhalt weder kopiert noch anderweitig verwendet werden.